"Flexible Finger Soft Ralobo" that adapts to different shapes and can handle multiple tasks with one hand.
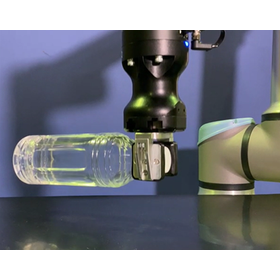



It is a flexible finger for robotic hands that combines high compliance and versatility for work.
By using Soft Laro Robo, the following can be achieved: - Reduction of design man-hours as no dedicated design for fingers is needed to match the workpiece. - No need for setup changes as one hand can handle multiple workpieces. - Cost reduction as there is no need for a tool changer. Three features of Soft Laro Robo!! 1. Simple Design Easy setup without additional equipment like air. Simple installation with three screws on the back. *Please prepare a separate jig for connecting to the robot hand. 2. Improved Gripping Robustness The hand can be shared among various types of workpieces, eliminating the need for a tool changer. No dedicated design for each workpiece is necessary, leading to a reduction in design man-hours. 3. High Durability Design Achieved over 1 million grips in durability tests. High holding power confirmed even after durability testing.
basic information
Dimensions: 41mm (height) × 36mm (width) × 12mm (thickness) "Width is equivalent to 2 fingers" Weight: 20g per piece
Price information
For more details, please contact us.
Delivery Time
Applications/Examples of results
1. Setting and removing parts from processing machines, machine tending 2. Transporting workpieces between processes 3. Packing work, parts picking 4. Gripping process with robot hands and parallel chucks 5. Experimental/research applications of various robots
Related Videos
catalog(3)
Download All Catalogs


Recommended products







Distributors

Inaba Electric Industry Co., Ltd. Machinery Company - Three Business Areas 1) Robot and FA Business Robots are expected to automate the workplace, alleviate labor shortages, and stabilize quality. We propose a system of products, including not only collaborative robots that can be used without safety fences but also industrial robots and control devices that enhance productivity within factories. 2) FA Solution Business We provide comprehensive proposals that cover everything from software to hardware and networks, including "remote maintenance," "data collection," and "application development." 3) Original Product Development Business We are engaged in the development of products that enable the visualization of factories and the realization of smart factories through the use of IoT. We accurately capture the trends of the times and customer needs, and develop original products with high technical capabilities.